|
Bionika
to zastosowanie wiedzy biologów w technice do
konstrukcji nowej generacji technologii, maszyn, robotów
a nawet farb i urządzeń
codziennego użytku. Jak wiele cech organizmów żywych
jest inspiracją dla dzisiejszych konstruktorów?
Wprowadzenie tego rodzaju zajęć gimnazjum ma na celu :
-
zainteresowanie uczennic/ów wiedzą interdyscyplinarną.
-
wdrażanie uczestników do wykonywania konstrukcji
interaktywnych robotów poprzez łączenie wiedzy
zakresu nauk przyrodniczych , informatyki, robotyki.
-
kształtowanie umiejętności wyciągania wniosków z
przeprowadzonych konstrukcji i oprogramowania.
-
rozwijanie zdolności logicznego myślenia podczas
rozwiązywania problemów.
-
rozbudzanie i rozwijanie pasji badawczych oraz
konstruktorskich .
-
kształcenie umiejętności pracy zespołowej
-
przyswojenie zasad projektowania i sterowania automatami
przez młodzież .
-
opracowanie własnego projektu robota z wykorzystaniem
pakietu Lego MindStorm oraz sterownika NXT
-
rozwijanie zainteresowania takimi działami jak:
inżynieria bioniczna, inżynieria oprogramowania,
systemy automatyki, zarządzanie i sterowanie
procesami, tworzenie i zarządzanie projektami.
-
uświadomienie roli własnego rozwoju jako budowania
dalszej drogi kształcenia.
2012/13
Konstruowanie prostych robotów
    
2011/12
Rozpoczynamy pracę
   
Poznaliśmy przykładowe urządzenia z zastosowaniem cech
organizmu żywego, na tej podstawie powstały nasze prace
o tej tematyce.
praca z bioniki -
pobierz
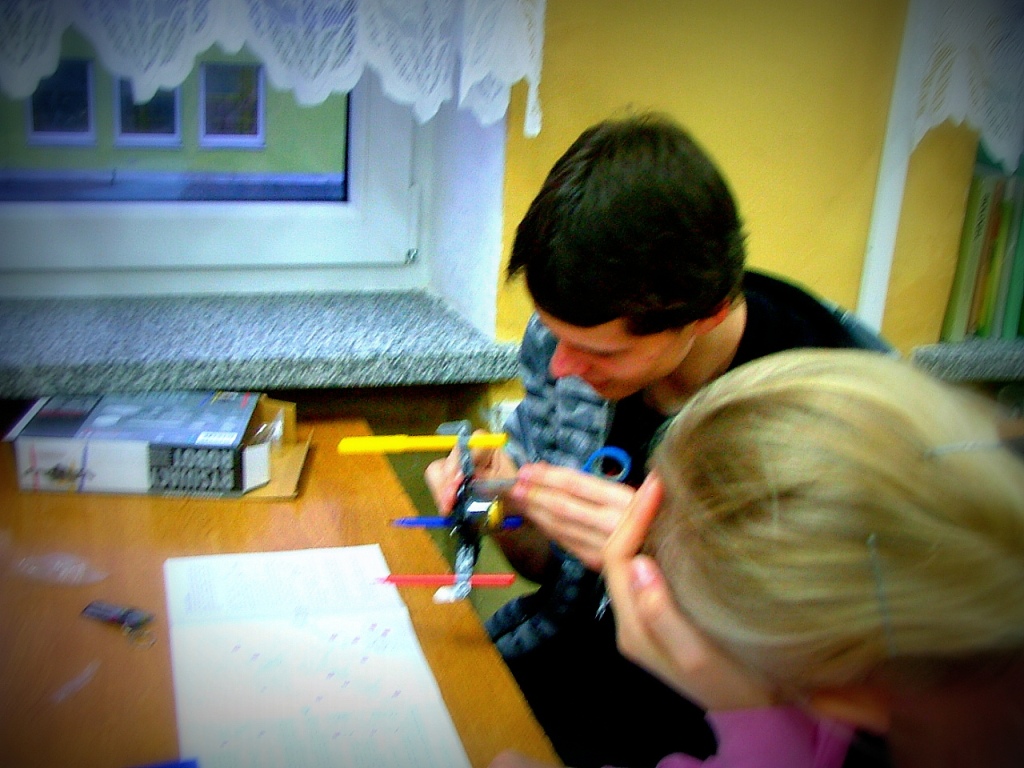
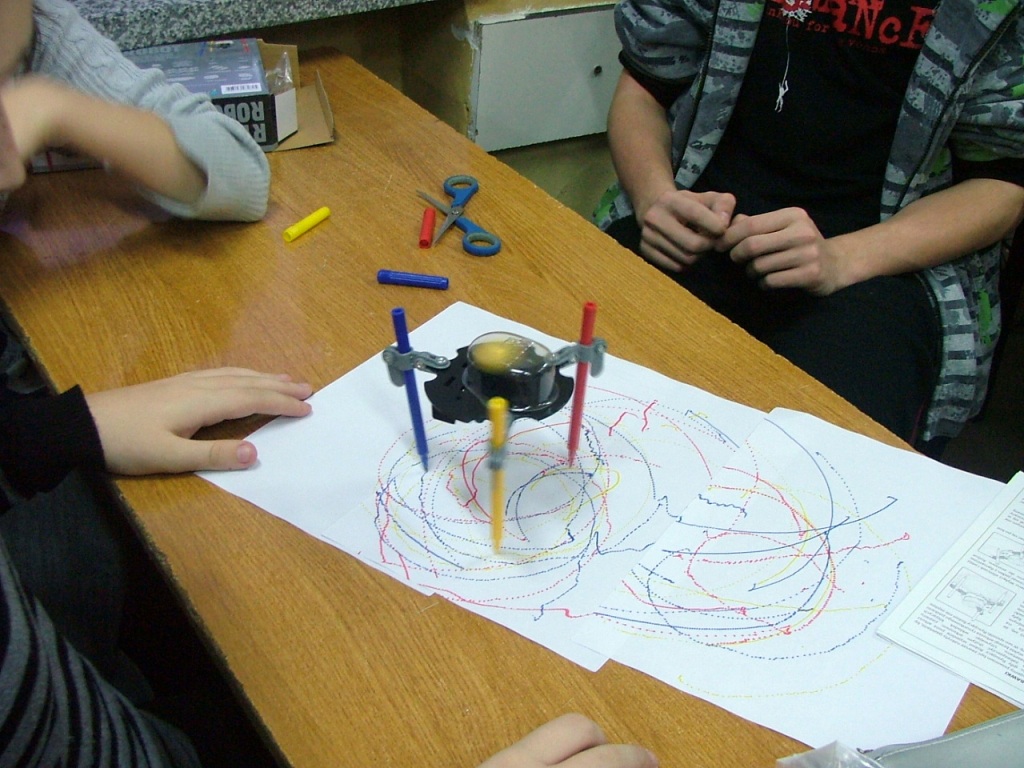
Konstruujemy proste roboty – sprytny robot, rysujący
robot.
   
Skonstruowaliśmy ramię robota naśladujące ramię
człowieka. Sterowalne komputerowo z użyciem
oprogramowania i kabla USB lub za pomocą pilota.
Wyniki
naszej pracy zaprezentowaliśmy młodszym koleżankom i
kolegom z klasy IV a .
  
Rozpoczęliśmy pracę z zestawem Lego i sterownikiem NXT
2.0
     
   
|